ROVR OpenDataset is a large-scale open 3D dataset designed for autonomous driving, robotics, and 4D perception tasks. It features:
- One of the largest multi-modal datasets combining LiDAR and camera
- Over 10,000 hours of high-quality driving data collected across North America, Europe, and Asia
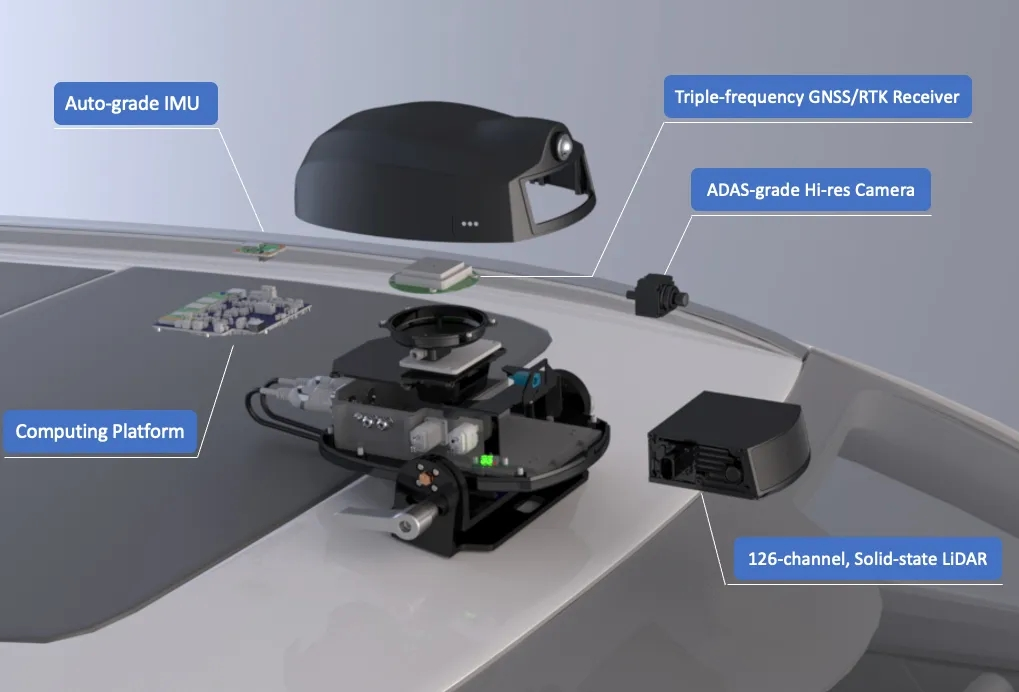
- Multi-sensor inputs: automotive-grade solid-state LiDAR, HD camera, RTK GNSS, and high-precision IMU
- Synchronized point cloud and image data for multi-task learning
- Semantic segmentation and 3D bounding box annotations coming soon
- Centimeter-level positioning accuracy enabled by GEODNET RTK corrections
- Free for academic research
- For commercial licensing, contact us at support@rovr.network